Guest Blog: Driving the Development of AV Merge Planning Algorithms at Stanford Intelligent Systems Laboratory
August 23, 2022
Applied Intuition partners with companies of all sizes and across industries, including the automaker Toyota, the autonomous mobile robot provider Seegrid, and the autonomous trucking company Torc Robotics (an independent subsidiary of Daimler Truck AG). Our team also maintains relationships with university research labs and supports their work in autonomy and autonomous vehicle (AV) development.
We are proud to publish a guest post by one of our research lab partners, Stanford Intelligent Systems Laboratory (SISL) at Stanford University. The team has been using Applied Intuition’s simulation products for their new publication about AV merge planning on freeways. Read the guest post below to learn how SISL tested and validated strategies for merging on freeways in the presence of cooperative or non-cooperative human driving behavior.
Our team at SISL conducts research on advanced algorithms and analytical methods for the design of robust decision-making systems. We are especially focused on systems for air traffic control, unmanned aircraft, and automated driving, where autonomous systems must make decisions in uncertain, dynamic environments while maintaining safety and efficiency.
In September 2022, the Institute of Electrical and Electronics Engineers (IEEE) will host its annual Intelligent Transportation Systems Conference (ITSC). SISL will present a new publication at this year’s ITSC conference. Titled Uncertainty-Aware Online Merge Planning with Learned Driver Behavior, our publication explores how cooperative or non-cooperative human driving behavior should inform the AV planning process. During our research for this publication, we used Applied Intuition’s simulation products to speed up our development process and comprehensively test our AV merge planning algorithm.
Human driving behavior is highly nuanced and specific to individual traffic participants. For example, drivers might display cooperative or non-cooperative behaviors in the presence of merging vehicles. These behaviors must be estimated and incorporated into the AV planning process for safe and efficient driving. In our publication, we present a framework for estimating the cooperation level of drivers on a freeway and planning AV merge maneuvers by explicitly modeling drivers’ latent behaviors.
Some of the biggest challenges for academic research in the autonomous driving domain include internal software transfers and the maintenance of a suite of different development and simulation tools. Teams might find it difficult to integrate the pipelines and models they developed for previous autonomous driving projects into their ongoing research.
Applied Intuition’s extensive suite of simulation products has helped us solve these challenges. We have been able to seamlessly integrate our AV stack with Applied Intuition’s products, build our experiment suite quickly, and validate our AV merge planning algorithm using high-fidelity virtual environments.
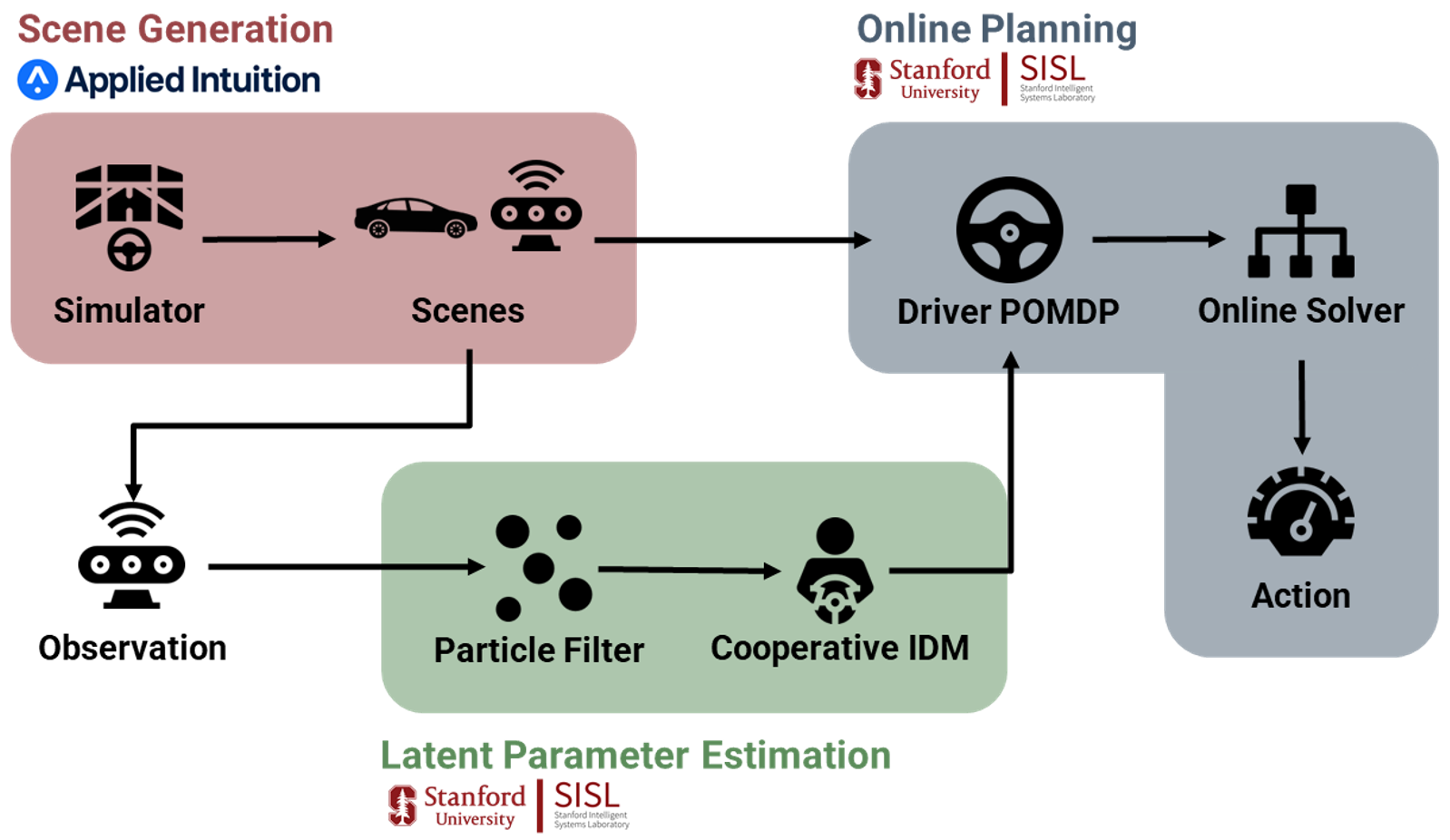
Applied Intuition’s stable simulation pipeline persists from project to project, allowing us to swap out components of our AV stack while relying on consistent core simulator functionalities such as customizable agent behaviors and metric logging (Figure 1). This has allowed us to focus on our core research mission without needing to spend time on software transfers or tooling maintenance.
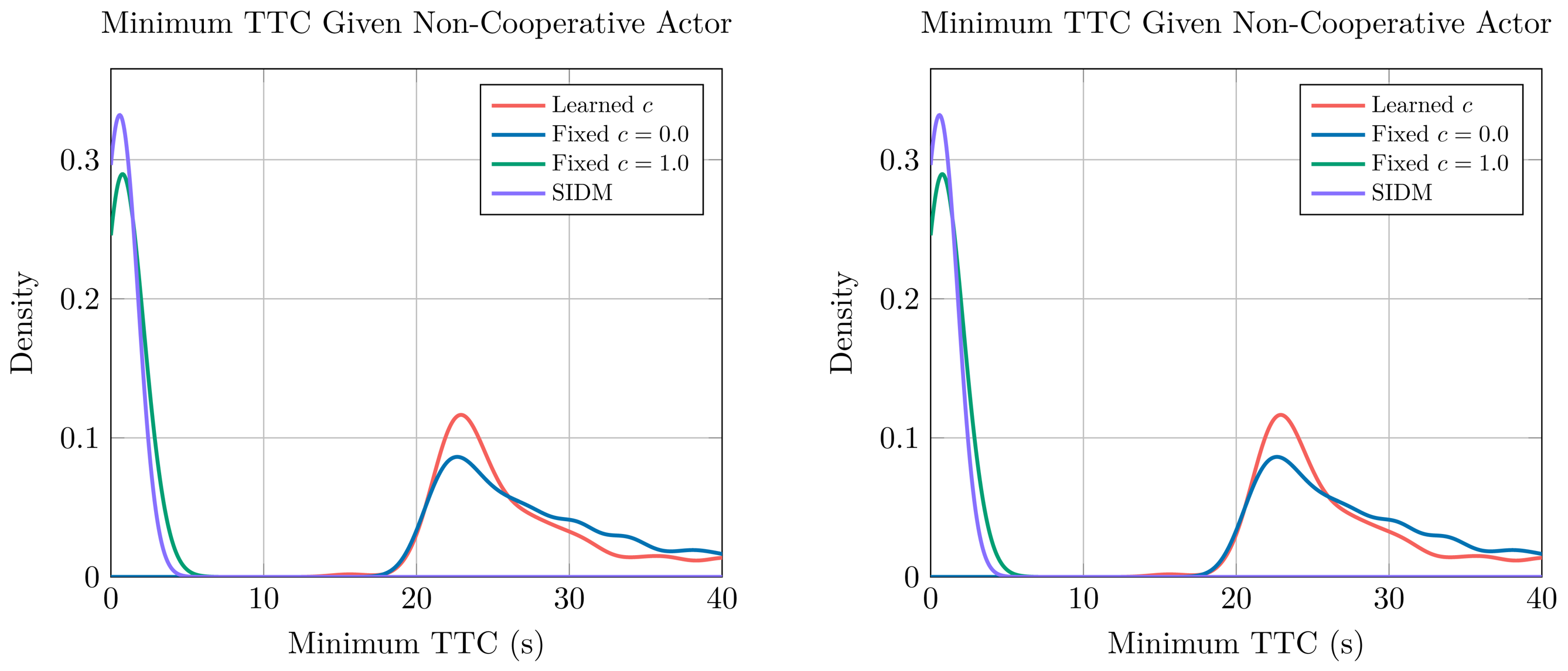
Our team develops its decision-making algorithms in the Julia programming language. For this particular project, we investigated how awareness of the cooperation level of freeway drivers can impact autonomous freeway merging. We asked questions like: How should an AV merge on the freeway if drivers on the main lane are aggressive? What if drivers are more cooperative?
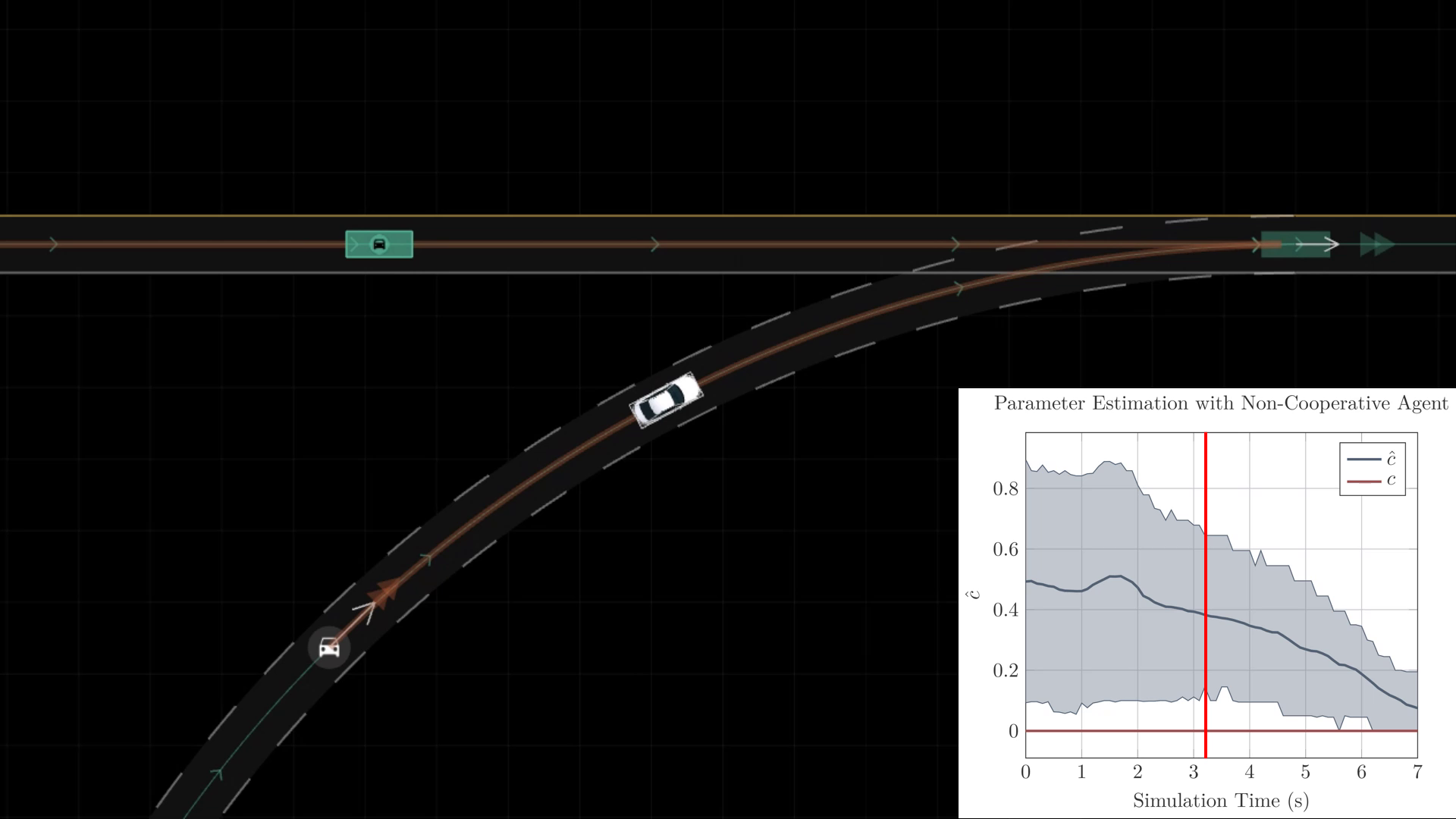
The Applied Intuition team provided us with a seamless customer interface that allowed our Julia stack to communicate with Applied Intuition’s Object Sim* simulator engine. Applied Intuition responded quickly to our feature request for a driver model for freeway agents in the presence of a merging vehicle and added the Cooperative Intelligent Driver Model to its suite of customizable agent behaviors. This greatly reduced the amount of time we needed to set up our experiment suite (Figure 2) and effectively gave us a “plug-and-play” experience while testing our strategy for latent behavior estimation. We were able to quickly simulate hundreds of merge scenarios, accelerating our development process.
Thanks to Object Sim, our team was able to easily access diverse driver models and agent behaviors and realistically simulate cooperative and non-cooperative driver behavior. Object Sim’s scenario creation feature let us create and modify urban driving scenarios quickly to validate our decision-making algorithms in realistic environments (Figure 3). We then combined the driver modeling and scenario creation capabilities to thoroughly test our strategies for merging in the presence of cooperative and non-cooperative vehicles on a freeway.
Applied Intuition’s simulation products have been an indispensable component of our research experiments. They have provided us with a high-fidelity, easily modifiable simulation environment to comprehensively test our decision-making algorithms and have allowed us to focus fully on our core research objectives. Our collaboration with Applied Intuition was instrumental to our ITSC 2022 publication.
In the future, we will continue to use Applied Intuition’s products as we compute probabilistically safe sets for safe trajectory generation in the autonomous driving space (Figure 4). Object Sim’s flexible scenario creation feature will help us expand our experimental suite even further, while the visualization features in both Object Sim and Sensor Sim* will allow us to communicate our findings to key project stakeholders.
.gif)
Read our publication, watch the publication’s supplementary video, and learn more about SISL and Applied Intuition’s simulation products.
Note: Object Sim was previously known as Simian and Sensor Sim was previously known as Spectral.
.webp)
.webp)
