Motional’s nuScenes Dataset Now Searchable Through Applied Intuition’s Data Explorer
December 13, 2021

We’re excited to announce that nuScenes, the autonomous vehicle industry’s first open-source dataset, is now available in Data Explorer*, Applied Intuition’s drive data exploration software.
Developed by Motional, the nuScenes dataset is a public, large-scale, autonomous driving dataset with 3D object annotations. It contains 1,000 driving scenes, each about 20 seconds, captured by Motional test vehicles on the streets of Boston and Singapore. The scenes represent a diverse set of driving maneuvers, traffic situations, and unexpected behaviors, and are widely used by researchers to study challenging urban driving situations using the full sensor suite of an autonomous vehicle.
Motional is an autonomous vehicle joint venture founded by Hyundai Motor Group and Aptiv. Applied Intuition creates software that helps autonomous vehicle engineering and product development teams unlock AV technology innovation faster, safer, and easier.
Training machine learning models for autonomous vehicles requires large volumes of curated data. The best source of accurate training data comes from real-world drive logs because they match the exact conditions that the models will be evaluating in production. However, extracting specific, useful scenes from collected logs is time-consuming because the logs are often hours long and the useful data is very sparse.
From our web browser-based dashboard, researchers and development teams can query the nuScenes dataset for specific scenes, events, and anomalies in order to train their autonomous vehicle algorithms and analyze on-road disengagements for verification and validation.
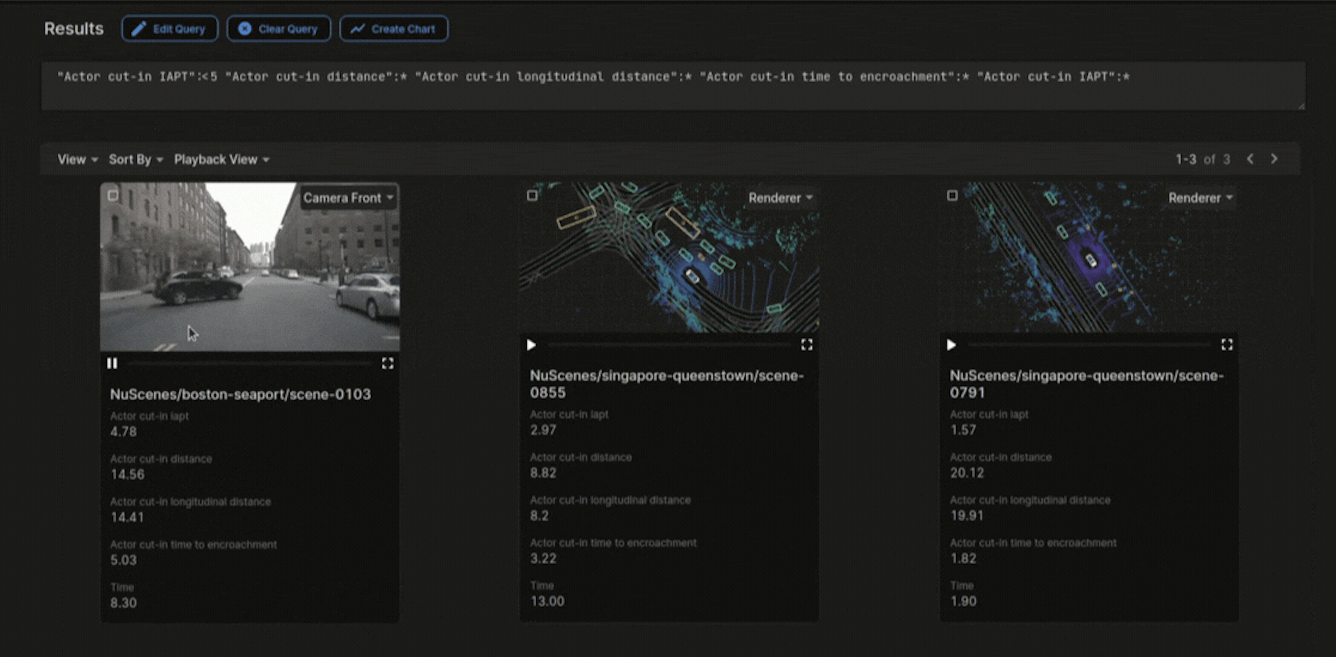
Data Explorer’s scenario search capability can quickly find and export relevant scenes from nuScenes’ real-world drive data. Using a powerful query engine, Data Explorer can search through log metrics, geographic locations, map data, computer vision detected objects, and higher-level behavior annotations (e.g., cut-ins). Once the relevant data is identified, it can be curated into a dataset of just the appropriate sections and downloaded by the user for local development.
Vehicle cut-in is a common event seen on public roads. Perception engineers may want a dataset of aggressive cut-in behaviors so they can improve the detection models needed to safely navigate around such instances in the real world. They use Data Explorer to search for instances based on the conditions set for euclidean distance (the distance between the AV and the cutting-in actor), longitudinal distance (the distance in front of the AV), and time to encroachment (time it takes for the AV to reach the point where the cut-in occurred) across the entire catalog of nuScenes data.

The queried scenes can then be further analyzed and shared across the team in a browser -based dashboard.

These examples are then selected, snipped into desired lengths, and downloaded to improve the performance of the detection models.

nuScenes is free for non-commercial use as described here. For commercial licensing please contact nuScenes@motional.com.
*Note: Data Explorer was previously known as Strada.
.webp)
.webp)
